FELADAT
MEGOLDÁS ( HARDVER )
MEGOLDÁS ( SZOFTVER )
PROGRAMKÓD
ELÔNYÖK
HÁTRÁNYOK
VIDEÓ FELVÉTELEK
KÉSZÍTÔK
FELADAT :
Feladatunk egy olyan többfunkciós készülék megvalósítása volt lego alkatrészekből mely képes scannerként és plotterként is funkcionálni.
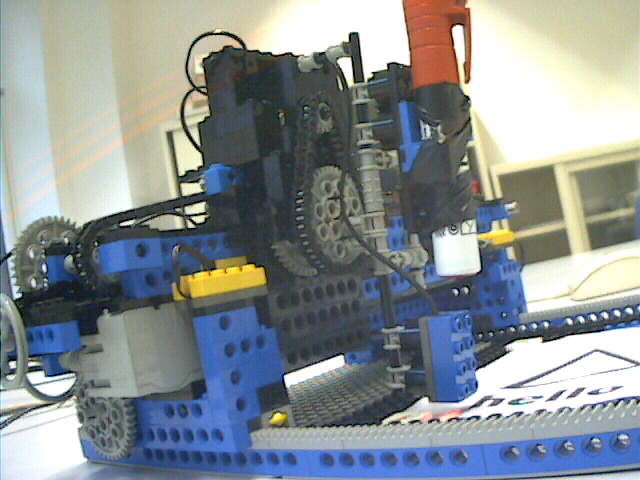
MEGOLDÁS ( HARDVER ) :
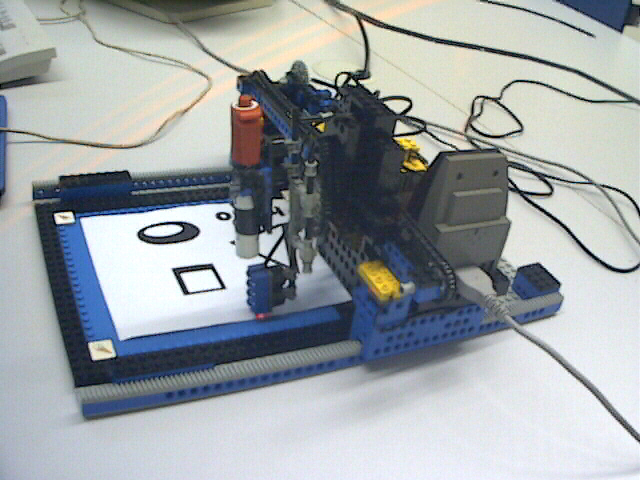
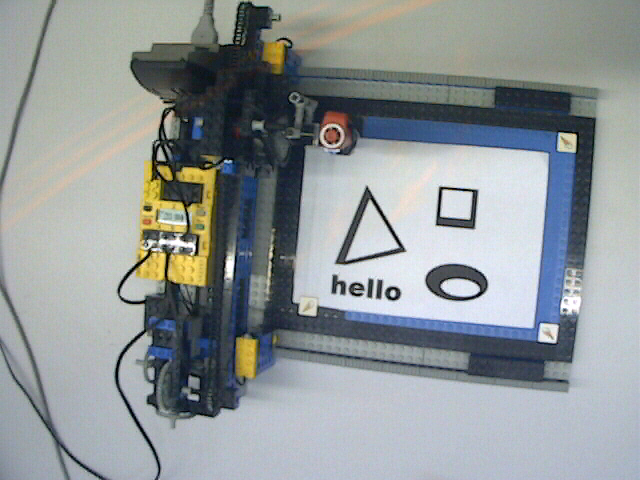
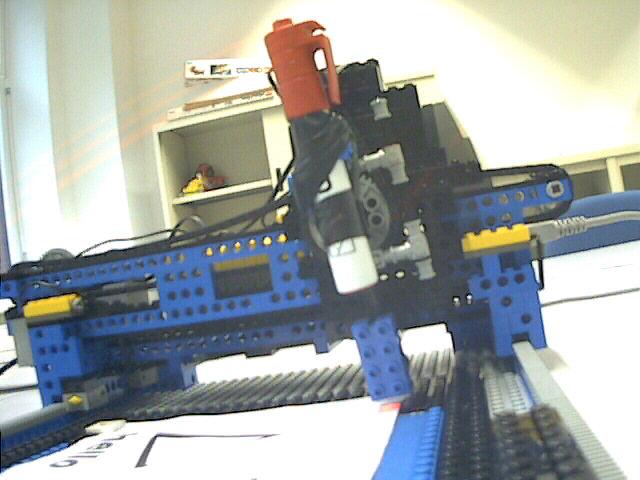
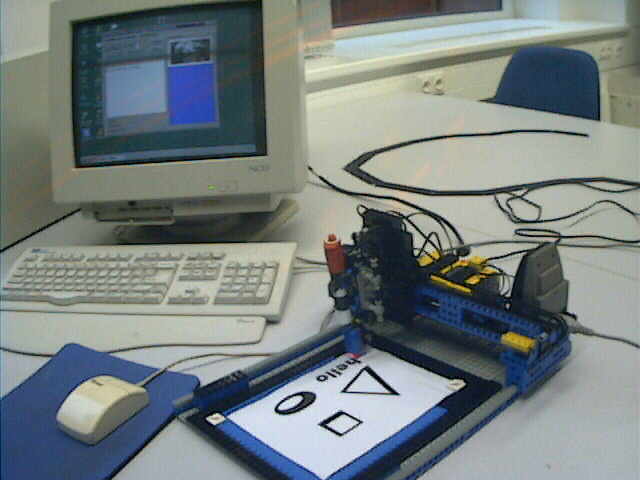
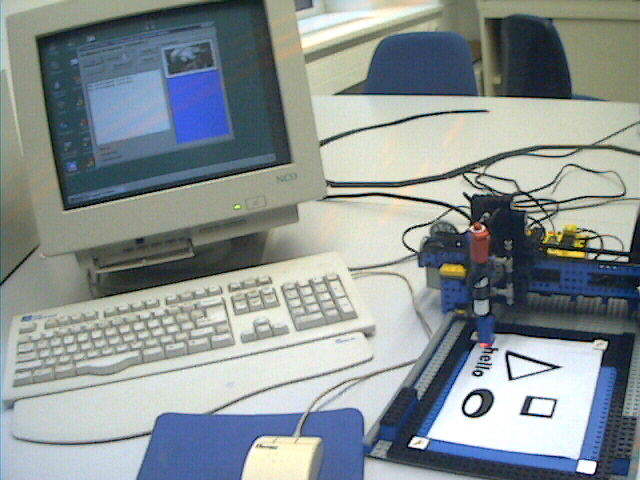
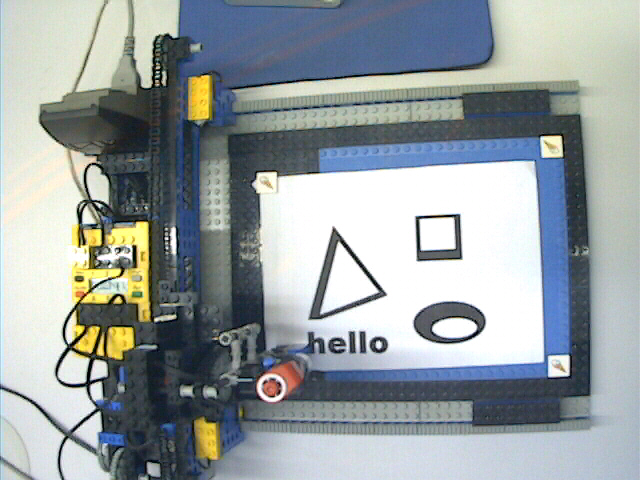
A hardver egy A5 méretű síklap felett, síneken futó fejszerkezet, melynek fejegysége 2 funkciós. A hardver minden eleme távolról irányított, azaz a vezérlő egység (rcx) ebben a robotban csak az adatok továbbításáért felel.
A munkalap felett futó fejtartó egység mozgatását mind motorral, mind pedig kézzel -tekerőáttétel segítségével- lehet elvégezni. A munkalapra erősíthető az a lap melyen a scannelendő ábra van, vagy egy üres lap, melyre a rajzolás történik.
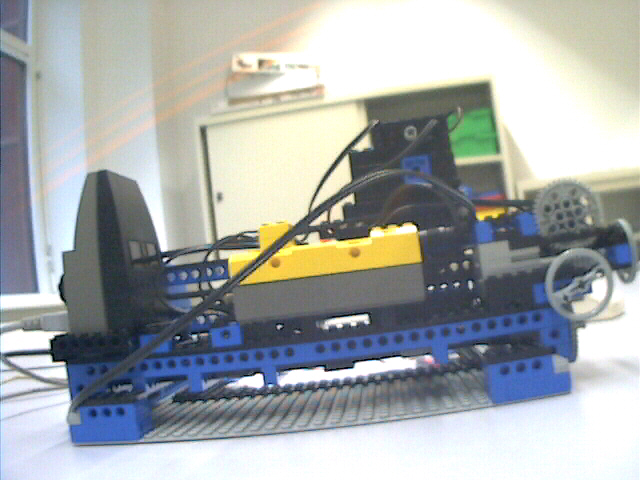
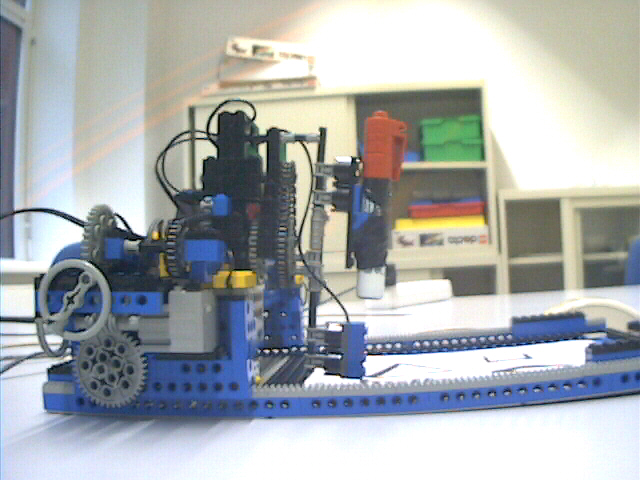
A fej mozgatásához 3 motort használunk :
- Egy a hosszanti mozgatásért felel, ez egy tengely segítségével a másik oldali sínre is visz át erőt. A tengely hossza miatt indításkor a tengellyel hajtott oldal kis késéssel indul köszönhetően a tengely csavarodásának. Ennek a motornak a mozgását a két végpontban ehelyezett érintésérzékelő felügyeli, ezeknek a zárásakor tudjuk hogy a fej végpontba ért.
- Keresztirányú mozgatásért felelős motor, mely egy lánc segítségével mozgatja a fejet a két oldal között. A lánc a fejegységre fixen van rögzítve. Ennek a motornak a mozgását a két végpontban ehelyezett érintésérzékelő felügyeli, ezeknek a zárásakor tudjuk hogy a fej végpontba ért.
- Fejforgató motor, mely a két üzemmód közti váltásért felel. Ennek a motornak a helyes pozicionálását ütközőkkel oldottuk meg, melyek függőleges helyzetben nem engedik a motort tovább forogni.
MEGOLDÁS ( SZOFTVER ) :
A szoftver delphiben készült és real time módon irányítja a robotot, tehát valós időben kapja az érzékelők által küldött adatokat, és ugyanígy küldi vissza az irányítási utasításokat.
Ez a szoftver architektúra egyrészről komoly előnyöket biztosít a 'hagyományos' vezérléshez képest (amikor a teljes program az rcx be kerül), hiszen sokkal összetettebb feladatok valósíthatóak meg, kihasználva az összetettebb nyelvi és hardver eszközöket (pl memória méret). Másrészről viszont a real time kommunikáció nem bizonyult minden esetben megbízhatónak, az érzékelők által kiolvasott jelek nem egyenletesen jutnak a vezérlőprogramhoz, és bizonyos esetekben előfordul hogy -valószínűleg a beolvasott értékeket tartalmazó buffer betellése esetén- hogy a program futását megszakító hiba keletkezik.
Ezt a hibajelenséget csak az érzékelők jeleinek ritkább beolvasásával lehet megszüntetni, de a hiba valós okát az architektúra sajnos elfedi (nem megfelelő hibaüzenet).
Ennek a hibának a kiküszöbölésére járható útnak tűnik, hogy bizonyos feladatokat az rcx-en futó egyszerű programmal valósítunk meg, és ezzel csökkentjük a real time kommunikációt.
A szoftverben az alábbi funkciókat implementáltuk :
Rendszerellenőrzés : a számítógép és az rcx közti kapcsolat ellenőrzése
Kalibrálás : a fejet a maxy, maxx koordinátákra majd a 0,0 pontba küldve a program felméri a munkalap területét. Ezen értékekből számolható késöbbiekben hogy hol tart a munkafolyamat.
Fejmozgatás : A fej író illetbe scannelő pozíciója közti váltás
Kétirányú mozgatás x,y pontba : ebben a funkcióban a fej külön mozogva jut el az adott pontba.
Egyirányú (ferde) mozgatás : ebben a funkcióban a fej ferdén mozog az adott pontba.
Scannelés : a munkalapra erősített kép scannelése (A5 kb 40 perc)
Scannelés megszakítása
Betöltés : korábban scannelt káp betöltése
Képminőség javítása : a scannelés közbeni mintavétel nélküli pontok kitöltése szomszédjaik színének átlagával.
A feladatot megvalósító program
Esemeny.pas
Main.pas
Vezerles.pas
Komplett program tömörítve
A ROBOT ELÔNYEI :
Fantasztikusan gyönyörű, atom design.
Hatalmas felbontás scanner üzemmódban : 15 DPI
További szoftveres képminőségjavítás maximalistáknak
Villámgyors váltás üzemmódok között : 3 sec
Nagysebességű scannelés A5 lapon : 40 min
Színes képek készíthetőek plotter üzemmódban (a filcek kézi cseréjével)
5. generációs felhasználóbarát vezérlőprogram nagyméretű magyar feliratú gombokkal
Olcsó üzemeltetés
A ROBOT HÁTRÁNYAI :
A kommunikációs hibának köszönhetően néha megszakad a scannelés.
VIDEÓ FELVÉTELEK :
Video 28.avi
Video30.avi
Video31.avi
.
KESZÍTETTÉK :
Baksa Klára
Kovács Gábor Zsolt
Rózsai Máté
Terray Tamás