Szükséges előismeret: Függvények aszimptotikus viselkedése, Jelölések, Élsúlyozott gráfok és ábrázolásaik, Szélességi keresés
Algoritmusok és adatszerkezetek 2. > Legrövidebb utak egy forrásból > Legrövidebb út kereső algoritmusok bevezetés
Legrövidebb út kereső algoritmusok bevezetés (Shortest path algorithms)
Gyakori feladat, hogy egy gráf egy tetszőleges csúcsából bármelyik más csúcsokba vezető legrövidebb utakat keresünk. Gondolhatunk például navigációs rendszerre, ahol a feladat két város közti legrövidebb út meghatározása. Ezt egy gráf segítségével modellezhetjük, a városokat csúcsokkal, a köztük vezető utakat súlyozott élekkel reprezentálhatjuk.
Az élsúlyok a távolságokétól eltérő metrikákat is kifejezhetnek. Gyakran használják idő, költség, büntetés, veszteség vagy más olyan mennyiség megjelenítésére, amely egy út mentén lineárisan halmozódik, és amelyet minimalizálni szeretnénk. Korábban a szélességi bejárásnál az élek száma jelentette az út hosszát, most az élek súlyozását fogjuk figyelembe venni.
A megoldandó feladat általánosan: Adott egy $G : \mathcal{G}_{w}$ tetszőleges élsúlyozott gráf és $s$ start csúcs. Keressük a start csúcsból induló legrövidebb utakat minden olyan csúcsba, amely elérhető $s$-ből.
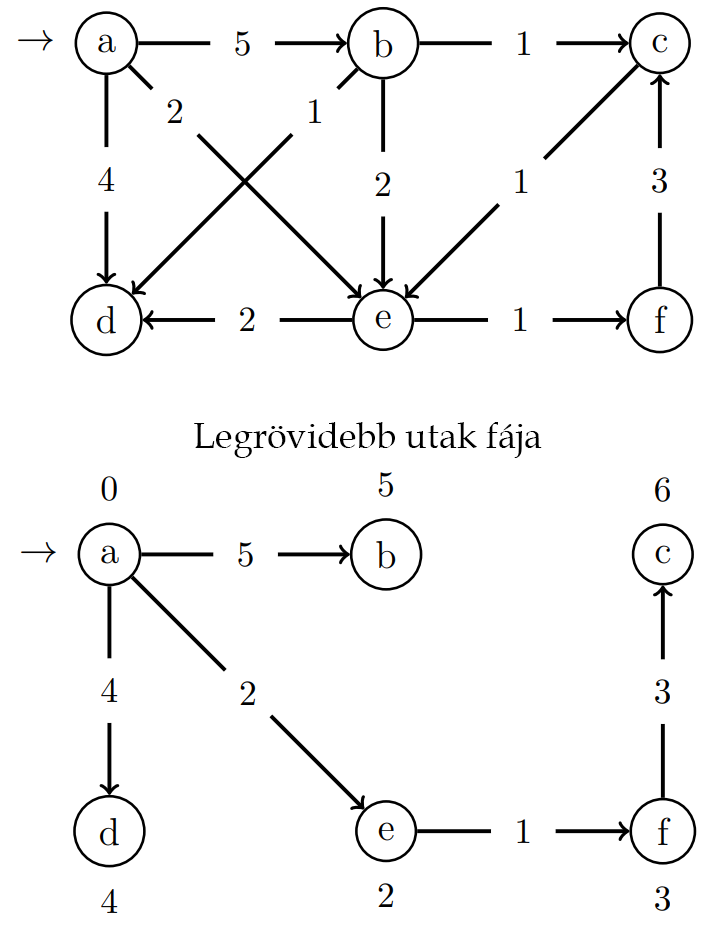
Befejezéskor egy legrövidebb utak fáját kapunk, azaz egy olyan $s$ gyökerű fát, amely az $s$-ből elérhető bármelyik $G$-beli csúcsba, egy $s$-ből kiinduló legrövidebb utat tartalmaz. Egy legrövidebb utak fája hasonló a szélességi keresés fájához, csak itt a kezdőcsúcsból kiinduló legrövidebb utakat az élek súlya szerint, nem pedig az élek száma szerint értjük.
Negatív súlyú élek:
A Bellman-Ford és a DAG negatív élsúlyokkal is tud dolgozni, a Dijkstra nem. Amennyiben a gráf tartalmaz a start csúcsból elérhető negatív összsúlyú kört, akkor a legrövidebb utak problémának nincs megoldása. Egy negatív összsúlyú körön újra és újra végighaladva folyamatosan legrövidebb utakat találnánk megállás nélkül. Amennyiben negatív élsúlyú gráfokkal dolgozunk, az algoritmusnak fel kell tudnia ismerni a negatív összsúlyú kört (Bellman-Ford algoritmus), ellenkező esetben végtelen működésbe kezdhet.
Alapvetően irányított gráfokkal foglalkozunk, de a feladat irányítatlan gráfok esetén is megoldható. Ebben az esetben nem engedhetünk meg negatív éleket egy forrásból sem, mivel ha az irányítatlan gráfban $(u, v)$ $s$-ből elérhető negatív él, akkor $< u, v, u>$ egy $s$-ből elérhető negatív kör.
Fokozatos közelítés:
Minden $u \in G.V$ csúcs esetén nyilvántartjuk az oda vezető eddig talált legrövidebb út hosszát: ezt $d(u)$ jelöli, valamint az $u$ csúcs közvetlen megelőzőjét, amit $\pi(u)$ jelöl. Az algoritmus működése során amennyiben egy $v \in G.V$ csúcs esetén az eddigieknél rövidebb utat találunk, akkor módosítjuk a csúcshoz tartozó $d(v)$ és $\pi(v)$ értékeket. A start csúcsra $d(s) = 0$ és $\pi(s) = \emptyset$, ha pedig egy $v \in G.V$ csúcs nem érhető el $s$-ből, akkor $d(v) = \infty$ és $\pi(v) = \emptyset$.
|
$d(v) > d(u) + G.w(u, v)$
|
||||
| $\pi(v) := u$ | $\text{SKIP}$ | |||
| $d(v) := d(u) + G.w(u, v)$ | ||||
Az alábbi algoritmusok közös vonása, hogy ismételten kiválasztanak és kivesznek egy csúcsot a feldolgozandó csúcsok halmazából, és a csúcsból kimenő összes élre végeznek közelítést. Ezeket a közelítéseket együtt a csúcs kiterjesztésének nevezzük, míg a csúcs kiválasztását a kiterjesztésével együtt a feldolgozásának nevezzük.